Many shops and technicians can come up with multiple reasons why they don’t want to perform ADAS calibrations or invest in the equipment. But, chances are they don’t understand what happens during an ADAS calibration. In most cases, the need is for the shop to extinguish an ADAS-related malfunction code or light. The other common reason is to determine why a driver is experiencing false activation or warnings from an ADAS system. However, an ADAS calibration is much more.
The most challenging concept to understand is that ADAS cameras and radar sensors do not have moving parts inside. Cameras are set at the factory for focus and field of view. Radar sensors have a very specific beam pattern that can’t be changed. So, when performing a calibration, it is more like you are adjusting the blinders on a horse with computer code than performing eye surgery.
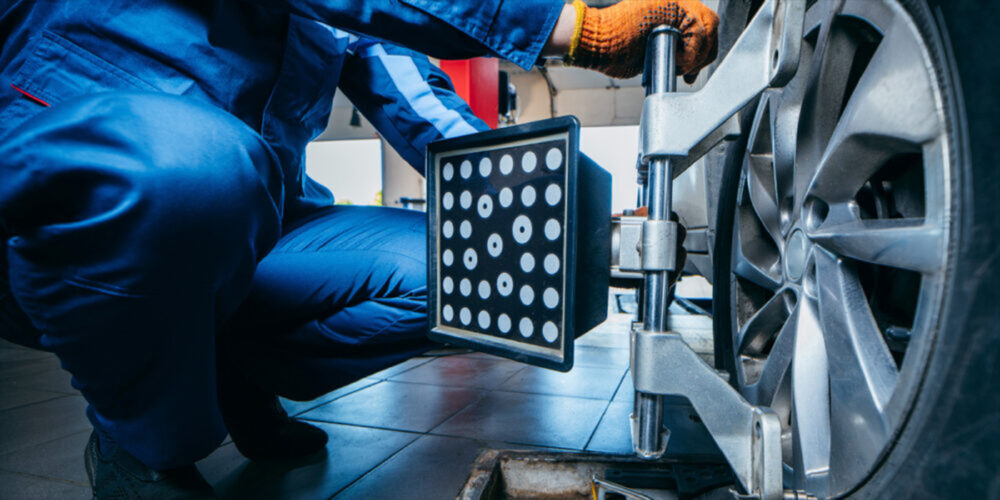
A calibration procedure typically uses a target with a specific pattern, shape or even thickness. The target is set at a specific distance, angle and orientation from a measured point on the vehicle. The vehicle knows what the target or fixture should look or sound like because it was programmed into the system at the factory. The scan tool activates this “memory” from its birthday, so it can compare and possibly adjust.
The majority of forward-facing cameras can’t mechanically change their point of view. The focus and field of view are set at the factory, and there are typically no moving parts. For example, no motors are moving the zoom or the angle of the camera. Instead, corrections are made with software that can “crop” in on the correct field of view and the vehicle’s centerline.
Think of the camera lens as a wide-angle, but the software uses it as a telephoto.
The same is true for blind-spot and rearview cameras. So, when you are calibrating the camera system, you are calibrating what area of the image the camera pays attention to. This prevents a roadside sign or a car in the next lane from becoming classified as an obstacle. Again, think of it as adjusting the blinders on a horse.
Sensors
Radar sensors emit radio waves that bounce off of objects and are received by the sensor. These types of sensors can detect objects and vehicles no matter the lighting conditions.

There are two types of radar: long-range and mid-range. Long-range sensors are used to measure the presence, distance and even speed in the narrow cone. This type of radar is called millimeter-wave radar by some manufacturers. Long-range sensors can measure up to 600 feet in front of the vehicle.
Mid-range can detect objects 200 feet from the vehicle. But mid-range radar sensors only measure objects that are in near proximity to the vehicle. These radar sensors can be used for blind spot and cross-traffic detection.
Calibration of radar sensors typically involves adjusting their position. Long-range sensors generally are mounted above or below the front bumper. Mid-range sensors can be mounted behind bumper covers, roof pillars and the corners of the vehicle.

The position of a long-range radar sensor can be moved using adjustment screws behind the sensor to adjust direction and elevation. This type of adjustment is typically required if the sensor has been replaced or disturbed.
Ultrasonic sensors have been on vehicles for more than 20 years. These are the small, round sensors mounted in the rear or front bumper of some vehicles. Ultrasonic sensors can detect objects that are typically within 10 feet from the vehicle. They send out soundwaves of a specific frequency that bounce off objects. The greater the return, the closer the object. These are very simple sensors that are used in backup monitor systems and blind-spot detection.
Ultrasonic sensors have a very wide angle of detection and low resolution. As a result, ultrasonic sensors don’t need calibration on most vehicles.
Calibration
The ADAS module assumes that the target is positioned correctly when the scan tool initiates the calibration mode. The system trusts that you took the time to set up the targets with some degree of accuracy. It compares the factory settings to the actual values. It uses this information to make adjustments. If the required adjustment is outside of the parameters, a mechanical adjustment to the sensor will then have to be made to the mount or adjusters, if you are lucky.


When you set up a target or fixture for a camera or radar, the position and distance from the vehicle is critical to the performance and operation of the system. If the target or fixture is a few millimeters off when placed a few meters from the sensor, it can change the alignment of the sensor by meters when it is pointed down the road or the height of the vehicle in the blind spot.
I know what you are thinking: What about dynamic relearns? It is the same philosophy but, instead of targets, the system uses specific inputs from the vehicle to the calibration. For example, many calibrations involve driving on a road with the proper lines to calibrate the camera. Imagine you are the vehicle, you can see with the camera, and you know vehicle speed, steering angle and other inputs.